|
|
|
|
 |
| |
А. Балковой, Г. Сливинская, Г. Тяпкин
Система управления линейным прецизионным электроприводом на базе сигнального процессора. Часть 2
В [1] был описан системный подход к проектированию опытного образца блока управления линейным прецизионным электроприводом. В данном материале рассмотрены вопросы конструирования, защиты от помех и схемотехники отдельных узлов этого блока.
Блок управления Servo2 предназначен для управления четырьмя осями прецизионного электропривода. С помощью блока можно управлять двухфазными синхронными и шаговыми двигателями, а также машинами постоянного тока. Возможно использование как линейных, так и поворотных двигателей. Для реализации замкнутого по пути режима к блоку подключаются аналоговые инкрементальные датчики положения. Управление блоком осуществляется по стандартному интерфейсу RS232 от PC-совместимого компьютера с минимальными системными требованиями.
Характеристики блока управления Servo2 приведены в таблице. На рис. 1 представлена структурная схема блока. Он содержит быстродействующий DSP, ЦАП и АЦП, силовую электронику - инверторы тока, импульсный источник приборного питания и источник силового питания.
Таблица. Характеристики блока управления Servo 2
| Устройство |
|
Характеристика |
Питание
Инвертор IM2-80-6
Модуль DSP
Модуль
ввода/вывода IO2 |
Вход
Источник силового питания DPS2
Источник приборного питания CPS2
Число инверторов
Максимальный постоянный ток
Минимальная индуктивность
нагрузки
Частота ШИМ
Защита от КЗ
Защита от снижения напряжения
питания
Задание тока
Монитор тока
Вход запрета (INHIBIT)
Выход аварии (FAULT)-OK
Процессор
Период квантования при управлении
1осью
Период квантования при
управлении
Режимы управления
Интерфейс верхнего уровня
Аналоговый вход (энкодер)
Аналоговый выход (инвертор)
Дискретный вход: TTL пользовательский
Дискретный
выход: TTL пользовательский |
220 В / 50–60 Гц<
80 В / 8 A
5 В / 7 A, +15 В / 2,2 A, -15 В /
0,65 A
1...4 (в зависимости от числа
осей)
±6
A
мГн
60
кГц
+
+
±10 В / ±6 A
1 В/A
0...1,5 В
75 Ом
ADSP21061
25 мкс
60 мкс
Разомкнутый с управлением по
модели
Замкнутый с управлением по
модели, регулятором состояния, наблюдателем и компенсацией нелинейностей
RS232
8 каналов / 12 бит / 6 мкс
8 каналов / 12 бит / 6 мкс
12 каналов
4 канала / 10 мА / изолированный
4 канала
4 канала
/ 24 В / 1 A / изолированный |
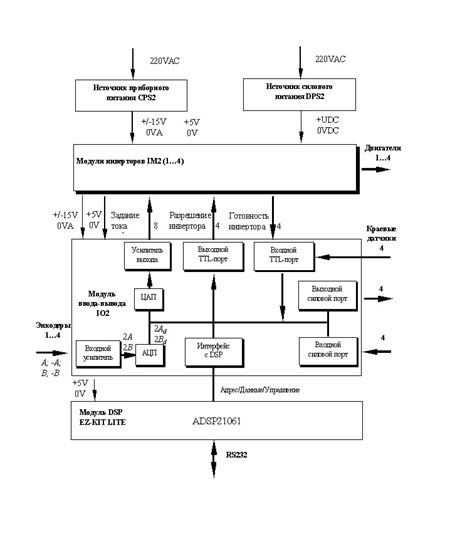
Рис. 1. Структурная схема блока Servo2 Проектирование блока потребовало решения вопросов, возникающих, как правило, при разработке любого сложного цифро-аналогового устройства:
выбор конструкции блока;
компоновка по составу и количеству модулей;
защита связей внутри и снаружи блока от помех;
номенклатура покупных модулей;
схемотехника модулей собственной разработки.
Ниже рассмотрены решения этих вопросов применительно к основным узлам блока.
Конструкция блока Servo2
Блок выполнен в стандартном электротехническом конструктиве размером 400?300?250 мм. Его можно устанавливать на вертикальной или горизонтальной поверхности (рис. 2). Элементы блока (за исключением внешних разъемов) закреплены на монтажной панели. Такая конструкция позволяет быстро монтировать блок, а также упрощает его обслуживание и ремонт. В основу конструкции положен принцип свободного монтажа по типу системных блоков ПЭВМ. Такая концепция имеет ряд преимуществ по сравнению с кассетной конструкцией (типа Евромеханики):
Рис. 2. Вид блока Servo2 с открытой крышкой
относительная дешевизна и доступность;
отсутствие жёстких ограничений к формату модулей и связей;
удобство доступа к отдельным модулям;
возможность изменения габаритов в зависимости от состава блока;
возможность гибко менять компоновку блока.
Блок питания
Блок питания состоит из источника приборного питания (CPS2) и источника силового питания (DPS2). Рынок предлагает сейчас большое количество приборных источников как зарубежных фирм, так и отечественных производителей. В блоке Servo2 использован импульсный источник фирмы ARTESYN NLP65, оптимальный по параметрам и цене. Для силового питания можно использовать дорогой мощный импульсный источник, дополненный цепью приёма рекуперируемой из приводов энергии, или построить дешёвый трансформаторный выпрямитель с большим ёмкостным фильтром на выходе, что увеличивает массу изделия. Из двух вариантов выбран второй с дополнением выпрямителя необходимыми блокировками, а также элементами защиты и индикации.
Разводка питания в блоке определяет общий фон помех. В Servo2 реализован традиционный подход: трансформатор питания и силовые блоки располагаются как можно дальше от аналоговых модулей. Провода питания и заземления разведены по принципу звезды с объединением в одной точке на модуле силового питания. Все питающие провода выполнены витыми парами для снижения индуктивных помех.
Модуль DSP
В качестве вычислительного ядра в блоке Servo2 используется отладочная плата EZ-KIT LITE с процессором ADSP21061. Состав платы: микросхема DSP, интерфейс RS232, микросхема памяти программ, стереокодек с усилителем и автономный стабилизатор питания - с избытком обеспечивает набор устройств, образующих контроллер электропривода. Удобно размещение микросхемы памяти программ в разъёме, что позволяет доработать штатную программу монитора. Наличие на плате EZ-KIT LITE интерфейса JTAG для подключения аппаратного эмулятора и возможность дублирования штатных кнопок сброса и прерывания выносными кнопками облегчает применение платы при разработке блока управления электроприводом. На разъёмы по периметру платы EZ-KIT LITE выведены все сигналы DSP, что упрощает сопряжение с интерфейсной платой аналоговых и цифровых сигналов (модулем ввода/вывода IO2).
Модуль ввода/вывода (IO2)
Из рис. 1 видно, что на плате IO2 размещены все периферийные элементы блока Servo2. Функционально модуль можно разделить на четыре части:
канал АЦП сигналов датчиков положения;
канал ЦАП заданий токов в инверторах;
цифровой интерфейс с DSP;
порт ввода-вывода дискретных сигналов.
Канал АЦП сигналов датчиков положения
В [1] рассмотрены критерии выбора АЦП по быстродействию и разрядности. Конкретная микросхема AD7864 в соответствии с этими критериям была применена с учётом:
удобного интерфейса с DSP (не нужна дополнительная управляющая логика), встроенного формирователя опорных напряжений и однополярного питания;
наличия нескольких модификаций по уровням входных сигналов и разрядности, что позволяет гибко менять параметры принимаемых и выдаваемых сигналов без изменения входных усилителей и использования внешних элементов.
Особого внимания потребовала схемотехника входного дифференциального усилителя и связанная с ней процедура обработки сигналов датчиков положения. В системе Servo2 используется аналоговый инкрементальный энкодер фирмы RENISHAW. Внешний вид датчика и форма выходных сигналов показаны на рис. 3.
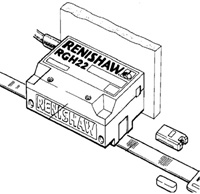 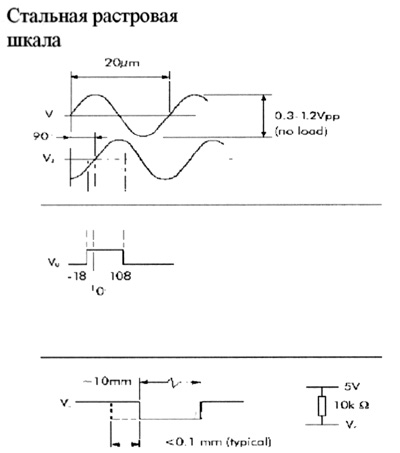 Рис. 3. Оптический аналоговый инкрементальный энкодер: а) внешний вид; б) форма выходных сигналов
Производитель гарантирует точностные характеристики датчика при использовании штатного кабеля с двойным экранированием и согласованием волнового сопротивления. Однако это схемотехническое решение не обеспечивает симметрию прямых и инверсных синусно-косинусных (каналы А; -A и В; -B) сигналов датчика. Сигналы энкодера имеют систематические ошибки (различие амплитуд сигналов по каналам, смещения нуля каналов, неквадратурность смежных каналов), вызванные перекосом измерительной головки относительно растровой шкалы и пульсацией воздушной опоры двигателя.
Указанные погрешности устраняются программной обработкой в DSP, поэтому в качестве дифференциального усилителя можно использовать недорогую микросхему SSM2141 фирмы ANALOG DEVICES с фиксированным усилением для аудио-применения. Основное её достоинство - интегрированные прецизионные сопротивления. Благодаря этому удалось компактно разместить на плате многоканальный дифференциальный каскад с хорошими характеристиками подавления синфазного сигнала и минимальным влиянием одного канала на другой.
Коррекция сигналов датчика осуществляется в DSP специальной программой, анализирующей вид фигуры Лиссажу для каналов 2Ad и 2Вd (рис. 1) и синтезирующей 4 параметра коррекции:
смещение нуля канала 2Ad;
смещение нуля канала 2Вd;
отношение амплитуд каналов 2Ad и 2Вd;
разность фаз каналов 2Ad и 2Вd.
Сигналы каналов 2Ad и 2Вd после коррекции подвергаются арктангенсному преобразованию для получения информации о положении. На рис. 4 приведены фигуры Лиссажу для каналов 2Ad и 2Вd до и после коррекции. Сопутствующие помехи в младших разрядах в виде белого шума мало влияют на качество регулирования, так как фильтруются программой наблюдателя.
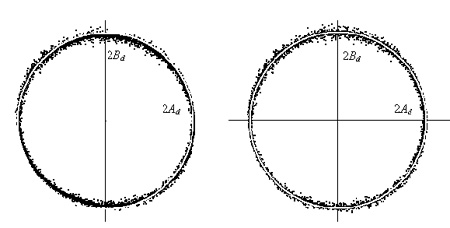 Рис. 4. Фигуры Лиссажу сигналов энкодера до программной коррекции (а) и после (б)
Канал ЦАП формирует задания токов в инверторы. В модуле IO2 установлены 2 микросхемы DAC8412 фирмы ANALOG DEVICES, которые выдают восемь сигналов с уровнем +/-10 В. Микросхемы достаточно просты в подключении, но требуют внешних опорных напряжений. В описании микросхем рекомендуются дорогостоящие двухполярные источники опорного напряжения, хотя широко известна дешёвая схема из однополярного источника и инвертора. В модуле IO2 использовано именно такое решение на популярной микросхеме REF-01 и инвертирующем усилителе на той же SSM2141.
Цифровой интерфейс с DSP включает в себя стандартный набор из шинных формирователей данных и адреса, а также логики сигналов управления. В этой части схемы не использованы популярные сейчас ПЛИС. Это объясняется тем, что поступающие на плату IO2 сигналы ADSP21061 не буферированы, и дальнейшая их трансляция по модулю IO2 недопустима. Поэтому шинные формирователи и дискретная логика на модуле IO2 расположены непосредственно у разъёмов, что при использовании ПЛИС было бы невозможно.
Силовые входы/выходы для технологических целей на IO2 реализованы в формате стан
артных модулей с гальванической развязкой. Такие модули УСО выпускаются фирмами GRAYHILL, MATSUSHITA, OPTO22 и ПРОТОН. Все они имеют стандартную конструкцию и электрические параметры.
Следует отметить, что качество разводки земляных и питающих проводников на модуле IO2 имеет первостепенное значение. Разделение цифровой и аналоговой земель, наличие фильтров по питанию для высоких и низких частот с использованием танталовых конденсаторов обязательно. Важна также топология сигнальных проводников, которые должны иметь минимальную ёмкость и индуктивность. Все эти требования удовлетворяются с помощью современной элементной базы в миниатюрных корпусах. Модуль IO2 реализован с применением SMD-компонентов на двухслойной печатной плате.
Модуль инвертора тока (IM2)
Функциональная схема и расчёт электрических параметров инвертора тока IM2 описаны в [1]. Здесь рассмотрена специфика проектирования этого модуля и его конструкция. Силовая часть модуля состоит из двух полных мостовых инверторов на полевых транзисторах IRF640, управляемых драйверами IR2132. Конструкция инвертора одноплатная. Все SMD-компоненты регулятора, ШИМ и драйверы ключей расположены с одной стороны платы, а силовые ключи на радиаторе и компоненты в стандартных корпусах - с другой.
Помимо учёта рекомендаций по применению фирмы IR, при проектировании инвертора реализовано следующее:
цепи питания каждого драйвера разведены отдельно для уменьшения взаимного влияния мостов;
питание драйвера развязано от аналогового питания +15 В с помощью диода;
тщательно подобраны резисторы в затворах транзисторов и шунты (диоды Шоттки) для уменьшения влияния индуктивности и ёмкости проводников;
возможна установка одного шунта в общем силовом проводе обоих мостов для цепей защиты драйвера и объединение сигналов ITRIP по схеме ИЛИ;
правильно выбран конденсатор в цепи зарядового насоса драйвера IR2132;
оптимально расположены силовые компоненты на плате с учётом взаимного влияния сильноточных цепей разных фаз инвертора.
Схема регулятора и ШИМ расположена на одной плате с силовой и не имеет с ней гальванической развязки. Такая конструкция требует тщательного проектирования топологии модуля, так как помехи из силовой части по общим цепям земли и питания могут сбивать работу ШИМ. В ШИМ тщательно нужно отнестись к выбору элементов генератора пилы. Линейность генератора пилы определяет качество регулирования тока. В регуляторе тока необходимо использовать быстродействующий операционный усилитель со скоростью нарастания сигнала не менее 40 В/мкс. В инверторе IM2 генератор настроен на частоту 40 кГц и построен на микросхеме TL082, а в регуляторе тока используется операционный усилитель LM318.
Заложенные в конструкцию прототипа блока управления схемотехнические и конструктивные решения показали высокую надёжность и помехозащищённость. При тиражировании малой серии блока Servo2 запланировано конструирование и изготовление собственной платы DSP с незначительными доработками прототипа EZ-KIT LITE. Блоки предназначены для комплектации прецизионных лазерных технологических установок с трёхосевым электроприводом на базе линейных шаговых двигателей.
Литература
1. Балковой А., Сливинская Г., Цаценкин В. Система управления линейным прецизионным электроприводом на базе сигнального процессора.
Опыт разработки // Chip News. 2000. № 9. С. 22-26.
|
|